Unprocessing Images for Learned Raw Denoising
Tim Brooks, Ben Mildenhall, Tianfan Xue, Jiawen Chen, Dillon Sharlet, Jonathan T. Barron
Summary
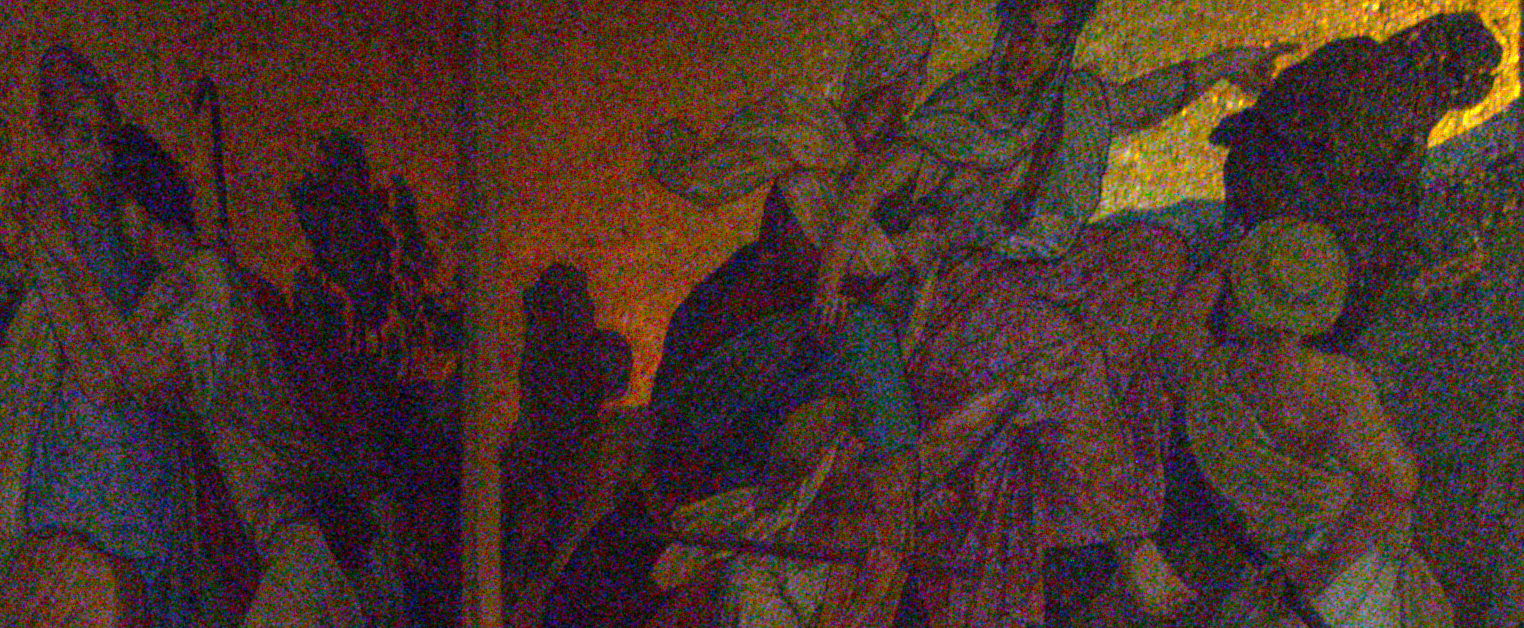

Before (left) and after (right) our denoising algorithm.
Denoising is an important step in image processing to make photographs look high quality. Especially in low light or with small camera sensors, photographs can exhibit high amounts of noise, making the photo look grainy and unpleasant. Machine learning has shown great promise to improve upon state-of-the-art denoising; however, previous techniques worked well on synthetic data and often generalized poorly to real photos. We propose a method for generating more realistic training data, which results in significantly better performance when denoising real photographs.
Abstract
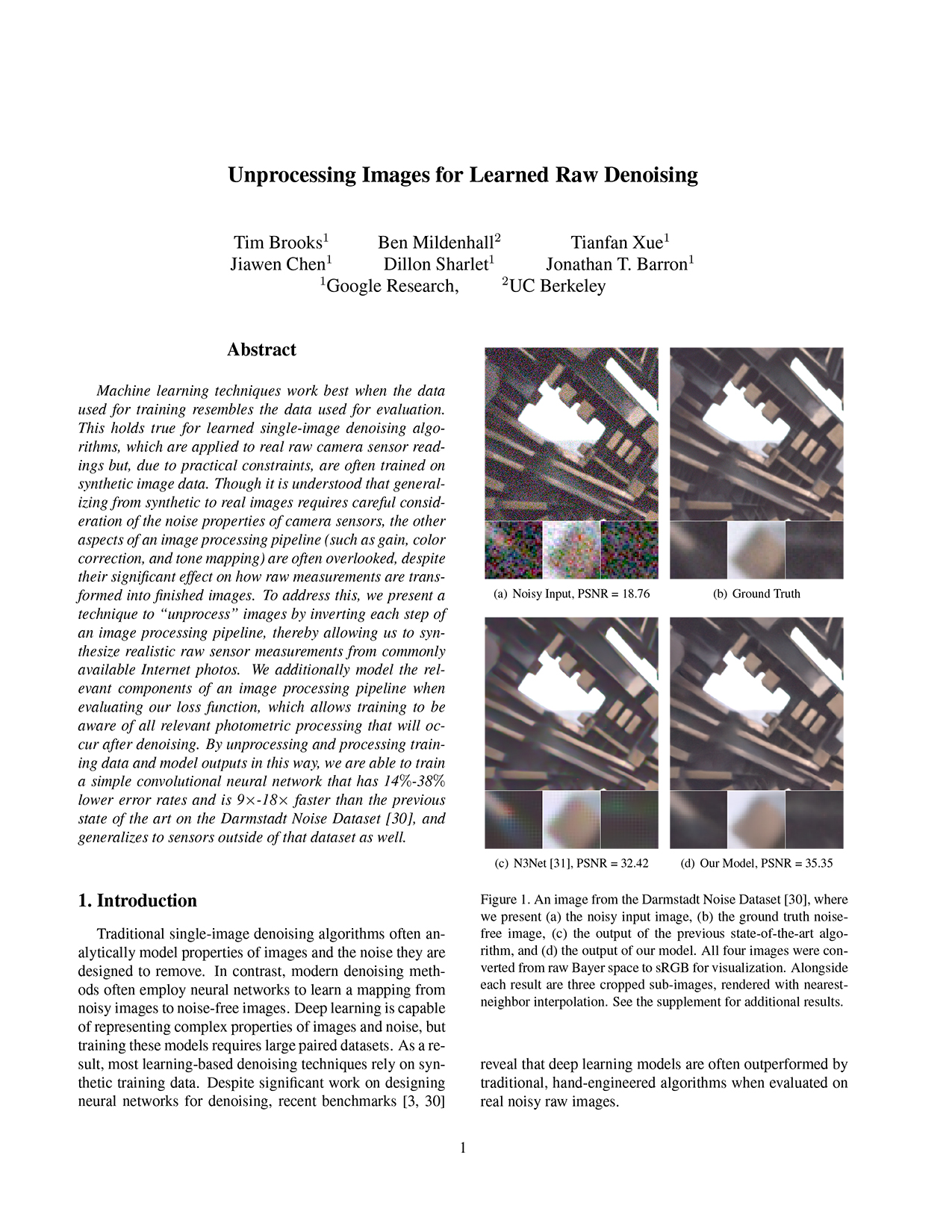
Machine learning techniques work best when the data used for training resembles the data used for evaluation. This holds true for learned single-image denoising algorithms, which are applied to real raw camera sensor readings but, due to practical constraints, are often trained on synthetic image data. Though it is understood that generalizing from synthetic to real data requires careful consideration of the noise properties of image sensors, the other aspects of a camera's image processing pipeline (gain, color correction, tone mapping, etc) are often overlooked, despite their significant effect on how raw measurements are transformed into finished images. To address this, we present a technique to "unprocess" images by inverting each step of an image processing pipeline, thereby allowing us to synthesize realistic raw sensor measurements from commonly available internet photos. We additionally model the relevant components of an image processing pipeline when evaluating our loss function, which allows training to be aware of all relevant photometric processing that will occur after denoising. By processing and unprocessing model outputs and training data in this way, we are able to train a simple convolutional neural network that has 14%-38% lower error rates and is 9x-18x faster than the previous state of the art on the Darmstadt Noise Dataset, and generalizes to sensors outside of that dataset as well.
Results
HDR+ Dataset Comparisons
Darmstadt Dataset Comparisons
Darmstadt Dataset Benchmark
Video
Paper
@inproceedings{brooks2019unprocessing, title={Unprocessing Images for Learned Raw Denoising}, author={Brooks, Tim and Mildenhall, Ben and Xue, Tianfan and Chen, Jiawen and Sharlet, Dillon and Barron, Jonathan T}, booktitle={IEEE Conference on Computer Vision and Pattern Recognition (CVPR)}, year={2019} }